川崎重工は、川崎汽船株式会社、川崎近海汽船株式会社の3社で取り組んでいる「安全離着岸支援システム」の研究・開発における実船を活用した実環境下での実証試験において、港湾内操船および離着岸操船の自動化※1に成功しました。
当社は、この成功を受け、本システムの受注活動を開始しました。
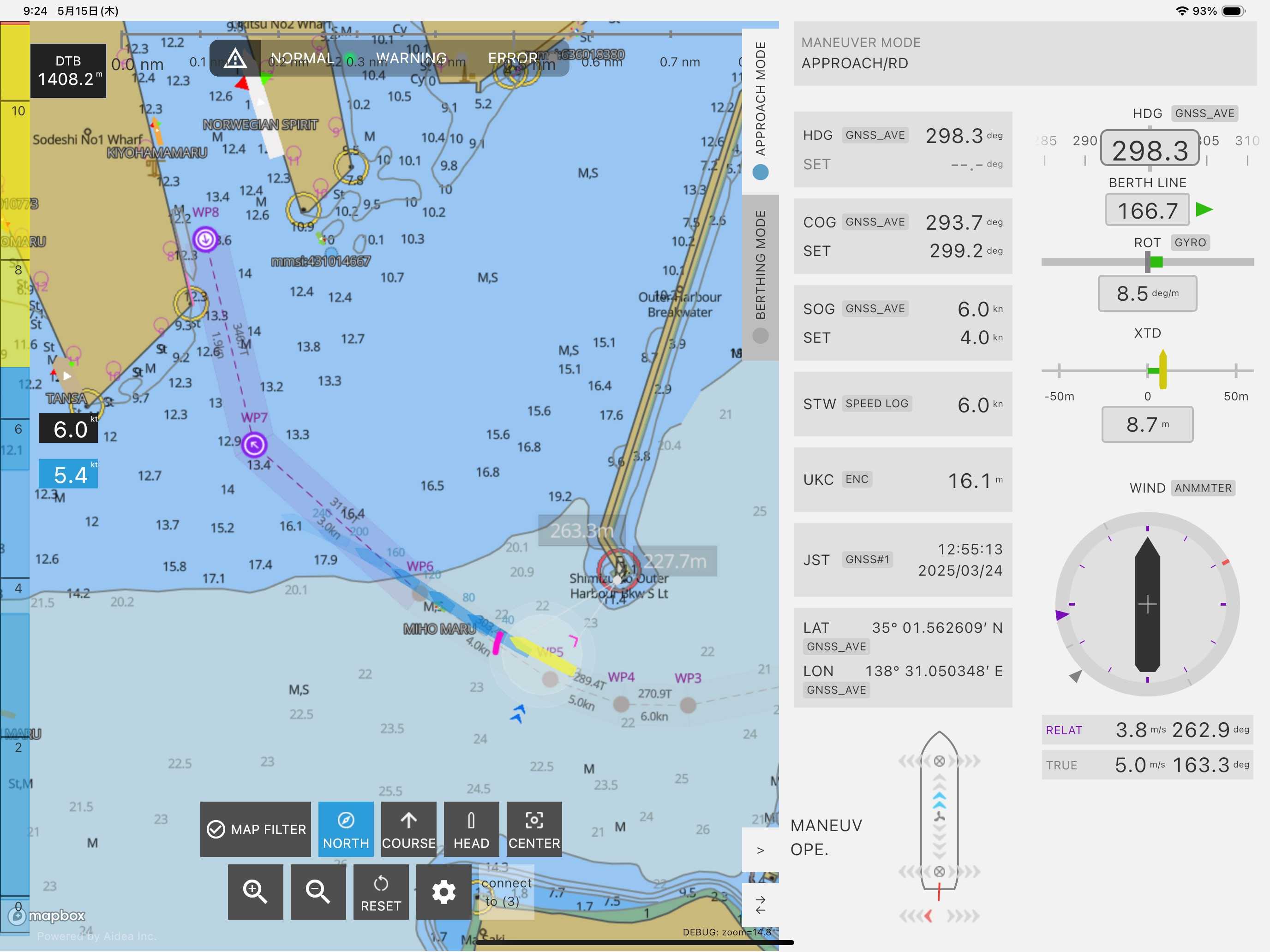
本システムの開発においては、風などの外乱がある中で岸壁との平行な船体姿勢を保ちながら、真横に船を移動させ着岸させる操船の難易度が高いことが技術課題として挙げられました。本実証では、当社が開発した操船支援情報表示装置※2および操船支援制御装置※3を使用することで、風や波のある条件下において、港湾進入から着岸(フェンダータッチ)まで、事前に設定した航路を自動追従航行し、入船(前進)および出船(後進)での自動着岸と離岸を実現しました。
現在、港湾内での離着岸作業は、操船技術に精通し、船固有の操縦性能と係船設備の特性を熟知した乗組員によって行われています。船舶の大型化による操船の高難易度化や船員人材不足の社会課題から、船舶操船・係船におけるさらなる省力化・省スキル化や安全管理の向上が求められており、本システムの導入により、難易度の高い港湾内における操船・係船の作業効率と安全性が大幅に向上します。また、本システムは船種を問わず導入が可能です。なお、本システムは日本海事協会(NK)のAiP認証を申請中です。(AiP:Approval in Principle「基本設計承認」)。
実証に使用した船舶
船舶の仕様
| 1)全長 |
173.34m |
| 2)全幅 |
26.6m |
| 3)総トン数 |
13,950トン |
当社は、推進機・DPS※4自動操船システム、舵取機・係船機など、船の推進から係船までのエンジニアリングを手掛ける国内唯一のメーカーです。離着岸操船から係船作業および係船管理までを一気通貫で支援する「安全離着岸支援システム」のさらなる改良と社会実装に努め、今後も海運業界の発展に貢献してまいります。
操船支援情報表示装置の表示画面
※1 着岸操船の自動化:船長がシステムに船速指令を与えるだけで、岸壁までの設定航路の自動追従、船首方位の自動制御、着岸時の平行移動が可能となります。また、岸壁や停船ポイントとの距離に応じた自動減速・停船機能、その場での自動回頭機能も有しています。
※2 操船支援情報表示装置:船体運動予測モデルと最新のセンシング技術により、将来の進路・速力や停船位置といった船体運動予測情報を提供する装置。風の影響を考慮した船体運動予測や、離着岸時における岸壁と船体間の距離と接岸速度をセンチメートル単位の精度で提供できる点が特徴です。なお、本装置は日本海事協会(NK)のP&S認証申請中です。(P&S:Products & Solutions)
※3 操船支援制御装置:船体運動予測情報をもとに、刻々と変化する気象・海象などの外力に影響される船速や船体姿勢を最適に制御する装置。操船者が設定する航路や船速に合致するよう、船体の姿勢保持や位置保持、航路追従を自動で行い、着岸までの操船を支援する。また、タグボートと連携した離着岸や係船機を統括制御した係船が可能となります。
※4 DPS(Dynamic Positioning System):GPS等の船体位置計測装置を使用して船体位置をリアルタイムに計測しながら、船体位置が所定の位置からずれないように推進装置や舵を自動的に制御するシステム。
以上