2023年4月1日より改正道路交通法が施行され、自動運転のレベル4(高度運転自動化)が解禁されました。これにより、特定の条件下ではドライバーによる一切の操作が不要となり、自動運転システムが全ての運転操作を行うことができるようになります。
NTTは、自動運転をはじめとするモビリティ関連技術の研究開発も進めています。
今回は、自動運転に対する期待がより一層膨らむ中、デジタルツインやAIといった、活用する技術とともに研究開発の進捗を紹介します。
なお、各技術に関する個別取材も受け付けておりますので、お問い合わせくださいませ。
------------------------- デジタルツインを活用した技術 --------------------------
(シグナルフリーモビリティ / ロボット配送)
NTTが掲げるIOWN構想の構成要素の1つとして、デジタルツインコンピューティング(DTC)があります。
DTCは、現実空間のヒト・モノ・コトのさまざまなデジタルコピーをサイバー空間で表現したうえで、データ分析や未来予測などのシミュレーションを行います。そして、その結果に基づき、現実空間のプロセスなどの改善や最適化に繋げます。例えば、人流や交通量のデータと都市の基礎データを結び付けることで、最適な交通環境の制御が可能になります。
■シグナルフリーモビリティ
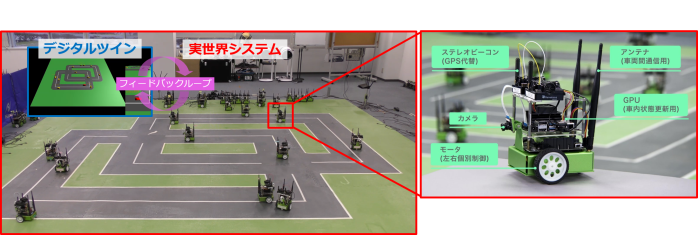
サイバー空間で解析・予測した、車同士が衝突しない状態を実世界にフィードバックし、他の車と通信しながら最適な速度や車間距離をキープするように各車を制御する技術です。渋滞の緩和や事故のリスク低減にも役立つこの交通制御技術により、信号機なしでも車が衝突しない未来を実現します。
本件に関して、技術の詳細や今後の展開についても個別取材を受け付けています。
詳細はこちらをご覧ください。
・世界初、交通全体の最適状態を予測・制御する分散深層学習技術を確立(
https://digitalpr.jp/r/59322)
(2022年5月30日発表 プレスリリース)
・デジタルツインでモビリティ群を賢く制御する──分散深層学習がもたらす未来の可能性(
https://journal.ntt.co.jp/article/19150)
(NTT技術ジャーナル)
図1:自動運転ミニカーを使った予測/制御フェーズ実験の様子
■ロボット配送
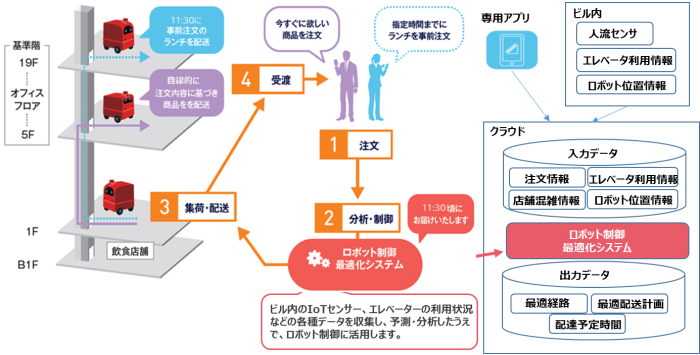
2022年10月~11月に「アーバンネット名古屋ネクスタビル」内の一部店舗を対象として、ロボットやエレベーターなどのビル設備情報や経路・店舗の混雑情報などをクラウドに集め、最適化シミュレーションを行うことで、注文完了後にロボットが人の指示を介さずに自律的に最適なルートを検索し、店舗へ集荷、該当フロアへの配送をすることをめざす実証実験を行いました。次のステップとして、今年1月より対象店舗・利用者を広げて実証実験を進行中です。
本件に関して、実証実験により得られた知見や今後の展開についても個別取材を受け付けています。
詳細はこちらをご覧ください。
・ビル内の混雑状況などを予測した自律的かつ効率的な「ロボットによるフードデリバリ」の実証実験開始について(
https://digitalpr.jp/r/63589)
(2022年10月3日発表 プレスリリース)
図2:ロボット配送の概要
------------------------------- AIを活用した技術 ------------------------------
(雑談対話AI/社会インフラ設備の錆検出/4Dデジタル基盤の実現に向けた技術/
配車プラン生成技術/農機の広域自動走行・遠隔監視制御)
NTTは、新たなドライビング・パートナーとしての高度な雑談が可能な対話AIや、これまで人力に頼ることの多かったインフラ設備の点検、災害時の電源車配車プランの生成などについても、技術開発を進めています。
■雑談対話AI
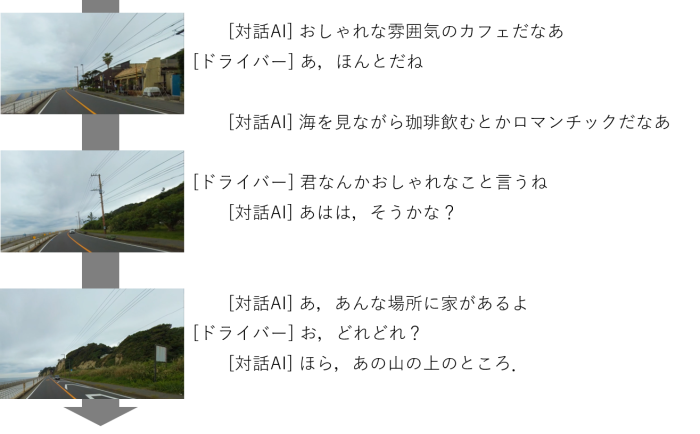
車から見える移り変わる景色を話題として、パートナーのように知識応答や共感応答をすることのできる対話AIです。
従来の大半の対話システムは、話者の発話から得られるテキスト情報のみを入力とすることが多く、その周囲のリアルタイムな画像情報や位置情報などを取り込めないことが課題でした。本対話AIでは、NTTが構築した深層学習に基づく大規模テキスト対話モデルを、ドライブ中の対話データ・周辺情報データを用いて追加学習することで、景色として見える画像情報や関連する外部知識に基づく、自然な対話を実現しています。今後は、日常的なドライブのパートナーをめざして、日々繰り返される対話への適用や、居眠り運転・漫然運転防止の実証実験に取り組んでいきます。
本件に関して、対話モデルのポイントや今後の展開についても個別取材を受け付けています。
詳細はこちらをご覧ください。
・世界初、移動体からの景色や周辺情報に基づく雑談を行う対話AIを実現(
https://digitalpr.jp/r/59307)
(2022年5月30日発表 プレスリリース)
・雑談対話技術(
https://www.rd.ntt/cs/team_project/icl/interaction_research/research_innovative08.html)
(NTT R&D Website)
図3:実現された対話の例
■社会インフラ設備の錆検出
画像認識AIを用いて、さまざまな社会インフラ設備に発生した錆を高精度に検出にする技術です。
画像認識AIによって、複数のデジタルカメラを搭載したインフラ設備点検用車両にて撮影した沿道の画像から、複数のインフラ設備を一括で識別・点検できるため、インフラ管理者ごとに実施していた現地点検の集約による稼働削減が期待できます。さらに、画像認識AIによる点検のため、点検員によって発生していたばらつきをなくし、点検品質の均一化が可能になります。
本件に関して、技術のポイントや具体的な利用イメージについても個別取材を受け付けています。
詳細はこちらをご覧ください。
・画像認識AIを用いて社会インフラ設備の錆を高精度に検出(
https://digitalpr.jp/r/58865)
(2022年5月16日発表 プレスリリース)
・社会インフラ事業の課題解決を実現する研究開発の取り組み(
https://journal.ntt.co.jp/article/18748)
(NTT技術ジャーナル)
・北広島町にて道路設備点検のDX化実験を開始 ~簡易カメラと画像認識AIの活用による設備点検の省コスト化にむけて~(
https://www.nttbizsol.jp/newsrelease/202208101000000728.html)
(2022年8月10日 北広島町・NTTビジネスソリューションズ発表 プレスリリース)
図4:インフラ設備の認識と錆の検出結果
■4Dデジタル基盤の実現に向けた技術
NTTは、ヒト・モノ・コトの多様なセンシングデータを精緻かつリアルタイムに高精度空間情報データベース上に統合し、高速に分析処理を行い、様々な産業分野に提供することで、様々な社会課題の解決や新たな価値創造をめざす「4Dデジタル基盤」の研究・開発を推進しています。
本件に関して、4Dデジタル基盤の全体像および構成する技術群や今後の展開についても個別取材を受け付けています。
詳細はこちらをご覧ください。
・モビリティ領域での4Dデジタル基盤の活用(
https://journal.ntt.co.jp/article/8072)
(NTT技術ジャーナル)
・4Dデジタル基盤の実現に向けた 空間情報処理技術(
https://journal.ntt.co.jp/article/7445)
(NTT技術ジャーナル)
・4Dデジタル基盤(
https://www.rd.ntt/4ddpf/0001.html)
(NTT R&D Website)
・街・モビリティの全体最適を実現する4Dデジタル基盤™の実現にむけた技術確立について(
https://group.ntt/jp/newsrelease/2020/11/12/201112b.html)
(2020年11月12日発表 プレスリリース)
・日本電信電話株式会社と株式会社ゼンリンの資本業務提携による協業の推進について(
https://group.ntt/jp/newsrelease/2020/03/26/200326b.html)
(2020年3月26日発表 プレスリリース)
・多様なセンシングデータをリアルタイムに統合し、様々な未来予測を可能とする「4Dデジタル基盤」(
https://group.ntt/jp/newsrelease/2020/03/26/200326c.html)
(2020年3月26日発表 プレスリリース)
図5:4Dデジタル基盤の全体像
■配車プラン生成技術
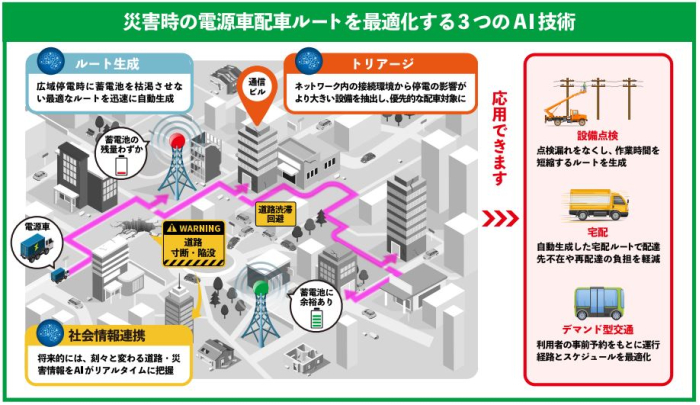
AIを活用して、災害時の被災設備について優先的に復旧する設備を算出し、復旧設備に対して電源車配車ルートを最適化する技術です。
停電による影響度が大きい基幹設備や、蓄電池の残量が少ない通信設備を優先的に巡回するルートを自動生成することが可能で、通信サービスなどの早期復旧に貢献します。また、災害対応のほか、設備点検や故障対応、宅配といったさまざまなユースケースでの配車最適化への応用も見据えています。
本件に関して、具体的な活用イメージや今後の展開についても個別取材を受け付けています。
詳細はこちらをご覧ください。
・配車プラン生成技術~被災設備への電源車配車などに活用~(
https://www.rd.ntt/forum/2022/doc/E-E04.pdf)
(R&Dフォーラム2022 展示内容)
・巡回ルート生成技術(
https://www.rd.ntt/research/NSL0011.html)
(NTT R&D Website)
図6:配車プラン生成技術の概要
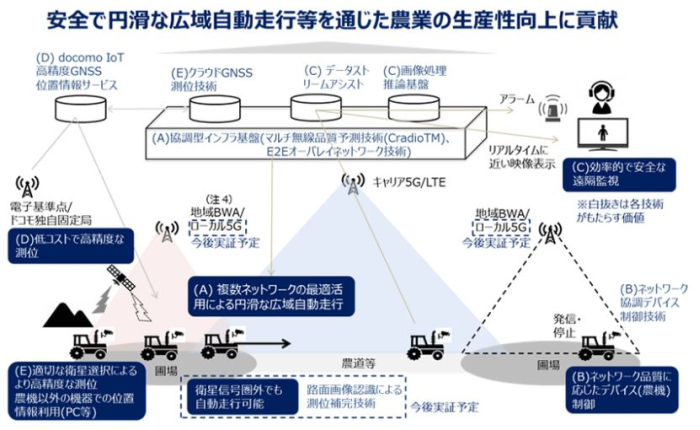
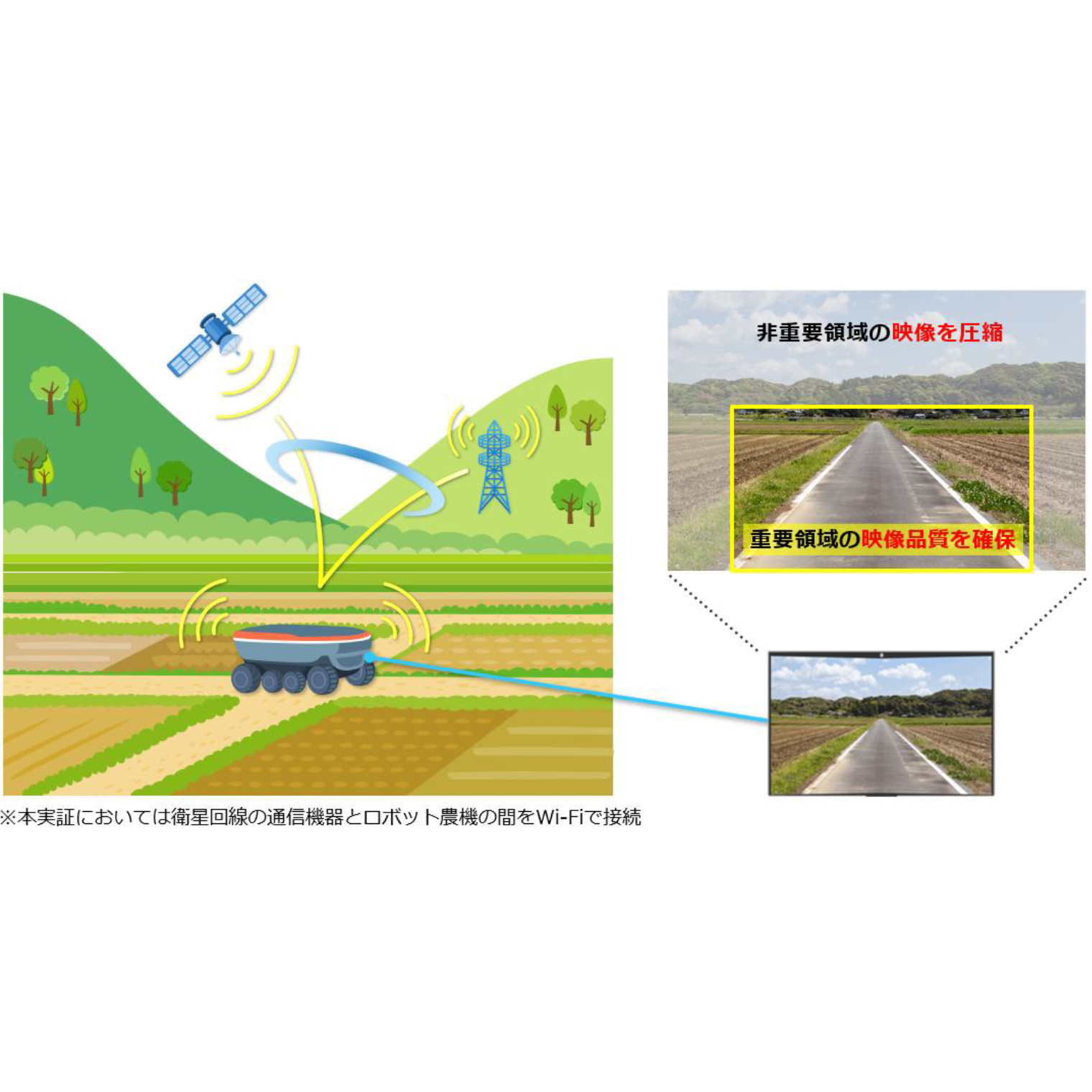
■農機の広域自動走行・遠隔監視制御
農機の無人状態での完全自動走行に向け、従来よりも安定して円滑な農機の広域自動走行と、その遠隔監視制御を実現しました。
今後は、ドローンや草刈・収穫ロボットといった農機以外への遠隔監視制御対象の拡大や、より多数の農機の遠隔監視制御、より広域での農業の自動化をめざしています。
本件に関して、取り組みの進捗や今後の展開についても個別取材を受け付けています。
詳細はこちらをご覧ください。
・ロボット農機や5G、IOWN関連技術による農機の圃場間自動走行と遠隔監視制御を実現(
https://group.ntt/jp/newsrelease/2020/11/16/201116b.html)
(2020年11月16日発表 プレスリリース)
・ミッションクリティカルなサービス提供を可能とする協調型インフラ基盤(
https://journal.ntt.co.jp/article/14925)
(NTT技術ジャーナル)
図7:農機の広域自動走行・遠隔監視制御の概要
今後も、NTTは自動運転をはじめとするモビリティに関わる技術開発を進め、より利便性を向上させつつ、安心・安全にモビリティを活用することのできる未来およびIOWN構想※実現への貢献をめざしてまいります。
なお、各技術に関する個別取材も受け付けておりますので、ご希望の場合は以下のお問い合わせ先までご連絡くださいませ。
※「IOWN(アイオン)構想」:革新的な技術によりこれまでのインフラの限界を超え、あらゆる情報を基に個と全体との最適化を図り、多様性を受容できる豊かな社会を創るため、光を中心とした革新的技術を活用した高速大容量通信、膨大な計算リソース等を提供可能な、端末を含むネットワーク・情報処理基盤の構想です。